Blobby Tennis release for Oculus Quest On Friday night I had the urge to release something for Oculus Quest, so I dug out Blobby Tennis, which I already tweaked to work on the Quest, made a build and put
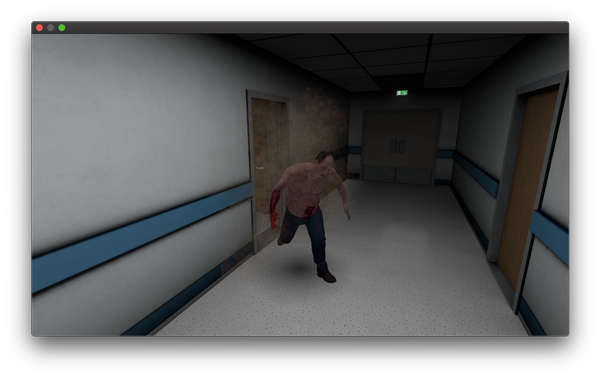
ProjectZ - Day 429 (Lights, Shadows and Reflections) I replaced my zombies with some more zombie like models and started tweaking the graphics :) Environment My static environment is sharing a single lightmap texture which I baked in Blender. The static detail
Project Z - Day 0 to 400 (Recap) Z Mission was the game my team developed during one of InnoGames game jams about 1 year and a half ago. It was a simple puzzle game with zombies, with the goal for
Ghost Or that's what my blog probably looks like... Anyway, I thought it's time for a change and switched my blogging software away from Anchor to Ghost. I also switched from Apache to Nginx
Echo Arena What can I say... after writing my previous blog post about Project Swords I started downloading the open beta of the VR game Echo Arena and couldn't stop playing since. In Echo Arena
Project Swords - Devlog 3 - Networking Basics After spending way more time than expected on getting microphone input and output to work correctly and fixing a bug in libsoundio along the way and a week at WWDC, I finally got
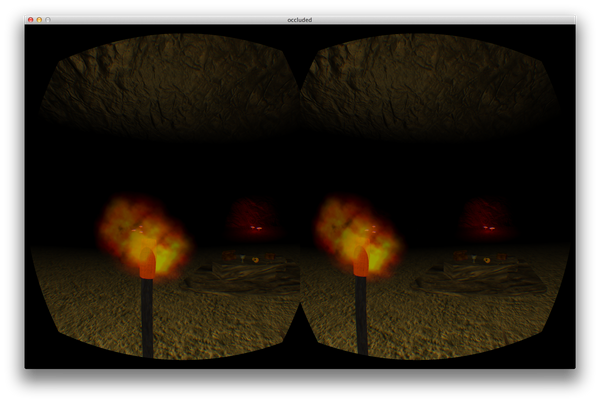
Project Swords - Devlog 2 - Audio Playback The Goal I want a fast and lightweight library handling 3D audio sources in a game environment as realistic as possible. This includes occlusion, realistic attenuation and delay based on the distance as
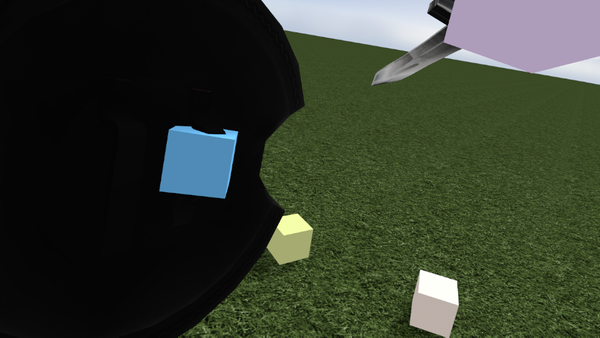
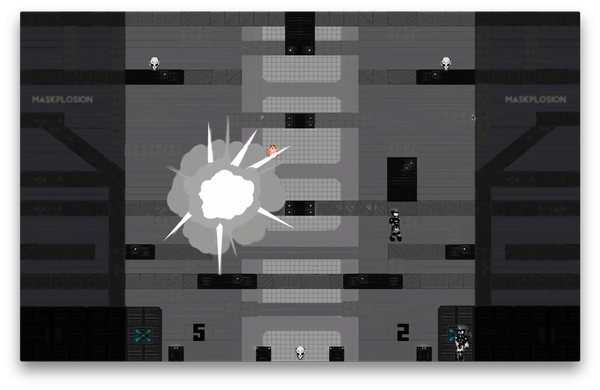
Project Swords - Devlog 1 - The Masterplan and Physics Problems Blobby Tennis I just launched Blobby Tennis on Steam [http://store.steampowered.com/app/628530] and the Oculus Store [https://www.oculus.com/experiences/rift/1449841275090025/] as a very small, but free VR
GGJ17 and Anchor Switch to Anchor As you may or may not have noticed, I switched the blog software from pants to Anchor. I reposted all posts, so their date is wrong but the content is
D3D12 Texture Mipmap Generation Introduction If you start writing a 3D graphics engine, the basics usually consist of loading mesh, texture and shader data and getting it to the GPU in a way that enables the GPU
IGJAM16 Introduction About half a year ago I ordered a ticket for Elbriot, which is a small metal festival in the middle of Hamburg. It used to be just one day, but was turned
Building a Quadcopter - Part 5: IMU and PID Inertial Measurement Unit I am using the Sparkfun 9DoF Block for Intel Edison which has an accelerometer, gyroscope and magnetometer. And while the accelerometer points down if it does not move it might
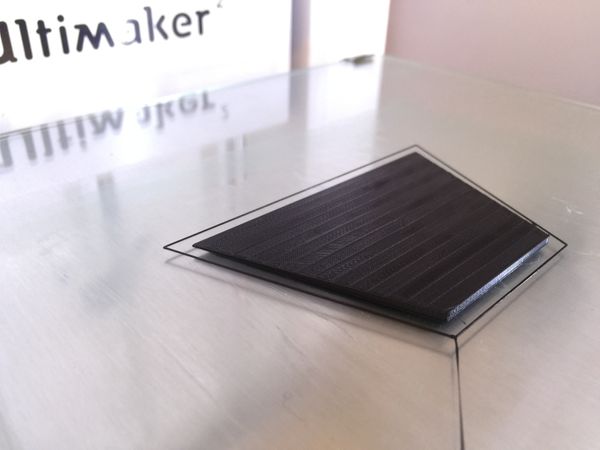
Building a Quadcopter - Part 4: Printing the frame My Setup I own an Ultimaker 2 and upgraded it with the Olsson Block which is a custom heater block that allows for easy nozzle switching. I used Cura as slicer in the
Building a Quadcopter - Part 3: Designing the frame Introduction I am not exactly great at this whole thing and I am constantly trying to improve things, so this is based on my design at the time of writing which is the
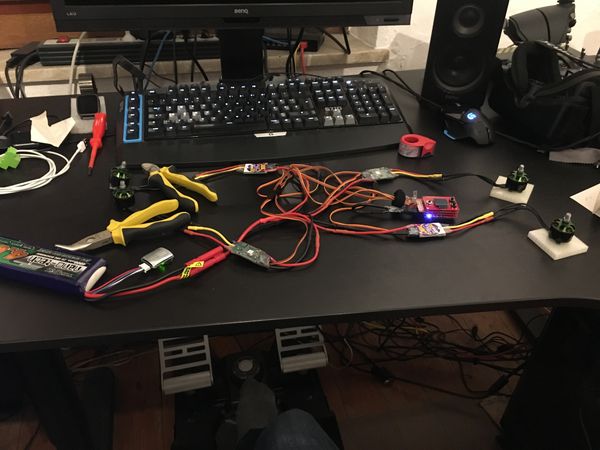
Building a Quadcopter - Part 2: Making the motors rotate Preparing the hardware The Afro ESC supports different ways of communication (PWM, I2C, UART), but PWM is most common for these and those pins are nicely exposed with a JR-Style Servo cable. The
Building a Quadcopter - Part 1: General idea and selecting parts Inspiration and helpful sources A bit more than a year ago I bought a 3D printer because I really wanted to and argued with the idea that I'd like to build my own
Building a Game for multiple Platforms with SFML We used SFML for our Gamejam Game Huitzilopochtli and it fully supports Windows, OSX and Linux and has experimental support for iOS and Android. The only Libraries used were Box2D and SFML. SFML
RE: #iggj9 #iggj9 Every couple of months InnoGames in Hamburg organizes a game jam. Everyone interested can participate and they even pay for food. And with 185 registrations and 34 games created it is also
#iggj9 Every couple of months InnoGames in Hamburg organizes a game jam. Everyone interested can participate and they even pay for food. And with 185 registrations and 34 games created it is also very
VR is awesome Lately "Virtual Reality" or "VR" in short is being turned into this next big thing so I decided to write about my past and present experience with it. Mostly I am going to
RE: Updating to Windows 10... > > I didn't write anything here for far too long and I probably won't in quite some time, but we'll see. Right now I just want to blow some steam about my current experience
Updating to Windows 10... I didn't write anything here for far too long and I probably won't in quite some time, but we'll see. Right now I just want to blow some steam about my current experience
I got a 3D printer! With a blog comes great responsibility so here is already my second post! (Good thing @widerwille.com reminded me that I got this new blog now...) About a week ago I ordered the
Hello World Wazzup!? @widerwille.com told me that I want pants and now I got pants! I might want to head to the store tomorrow and get more though... Getting pants actually turned out to